Préparation du système d'exploitation dans la mémoire interne de la carte BeagleBone Black du ROV (sous Ubuntu / Debian)
- Installer du logiciel de préparation d'image Etcher :
Dans la console Linux :
- Ajoutez le dépôt etcher à votre PC :
sudo echo "deb https://dl.bintray.com/resin-io/debian stable etcher" | sudo tee /etc/apt/sources.list.d/etcher.list
- Faire confiance à la clé gpg de etcher :
sudo apt-key adv --keyserver hkp://pgp.mit.edu:80 --recv-keys 379CE192D401AB61
- Mettre à jour le gestionnaire de paquets :
sudo apt-get update
- Installer Etcher :
sudo apt-get install etcher-electron
- Télécharger l'image système sur le site OpenROV : Lien direct
- Décompresser le fichier img.7z précédemment téléchargé. Le fichier obtenu a une extension .img
- Préparer la carte SD :
- Utiliser une carte SD de 4 Go minimum, Classe 10
- Insérer la carte micro-SD dans le PC
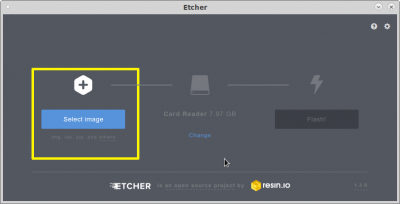
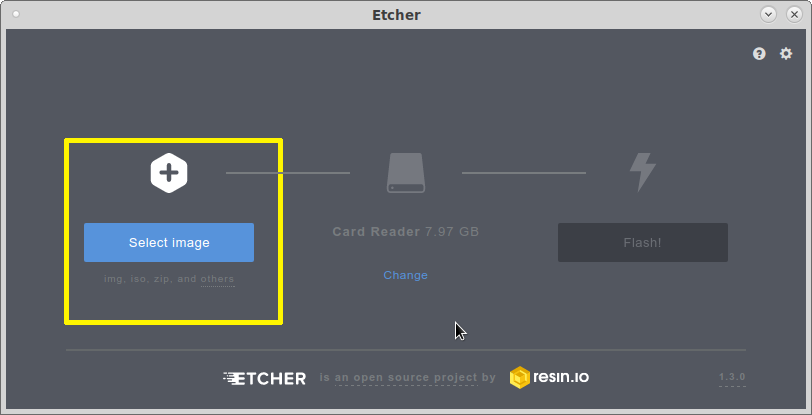
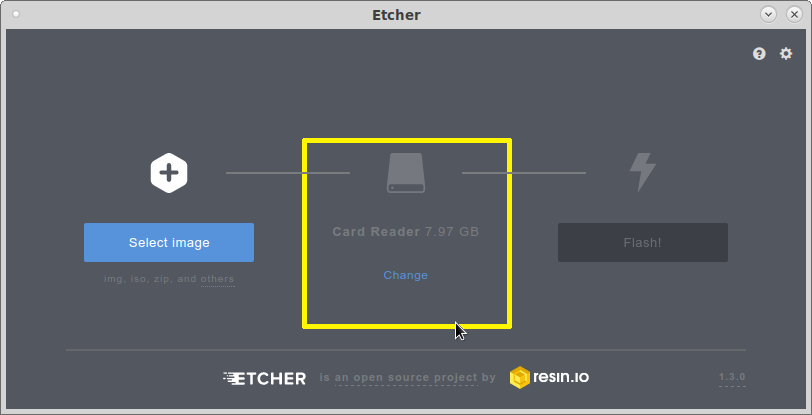
- Lancer Etcher
- Dans Etcher, choisir le fichier .img précédemment décompressé
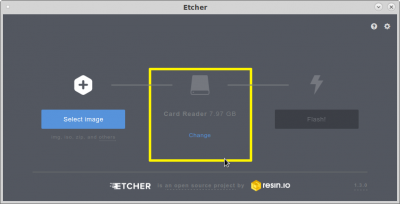
- La carte SD devrait être correctement détectée par Etcher
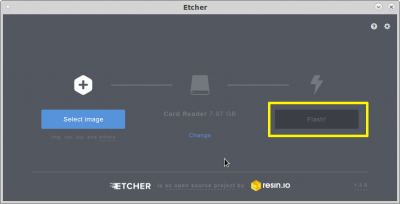
- Cliquer sur le bouton “Flash” pour lancer le processus de création de la carte SD.
- Après quelques minutes, Etcher devrait signaler que la création de la carte SD a réussi.
- Enlever la carte SD du PC

- Insérer la carte SD dans la carte BeagleBone Black
- Brancher la carte BeagleBone Black grâce au cable USB fourni (une alimentation de 5V/2A est recommandée, un port USB de PC pourrait ne pas être suffisant)
- Les 4 LEDs utilisateur du BeagleBone Black clignotent, signalant que l'installation est en cours. Le processus dure environ 15 minutes
- Une fois que les LEDs utilisateur du BeagleBone Black ne clignotent plus, le procassus d'installation est terminé.
- Débrancher le BeagleBone Black, retirer la carte SD : le système a été installé dans la mémoire interne du BeagleBone Black qui est désormais prêt.
Il est désormais possible de se connecter en SSH au sous-marin (Connexion SSH au sous-marin (sous Ubuntu / Debian)) ainsi que d'accéder à son interface web de contrôle / gestion / paramétrage (Connexion à l'interface web du sous-marin)